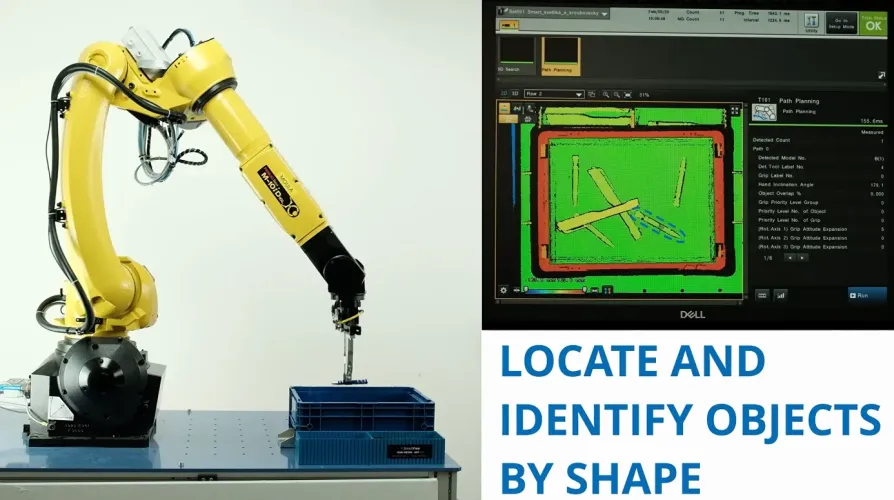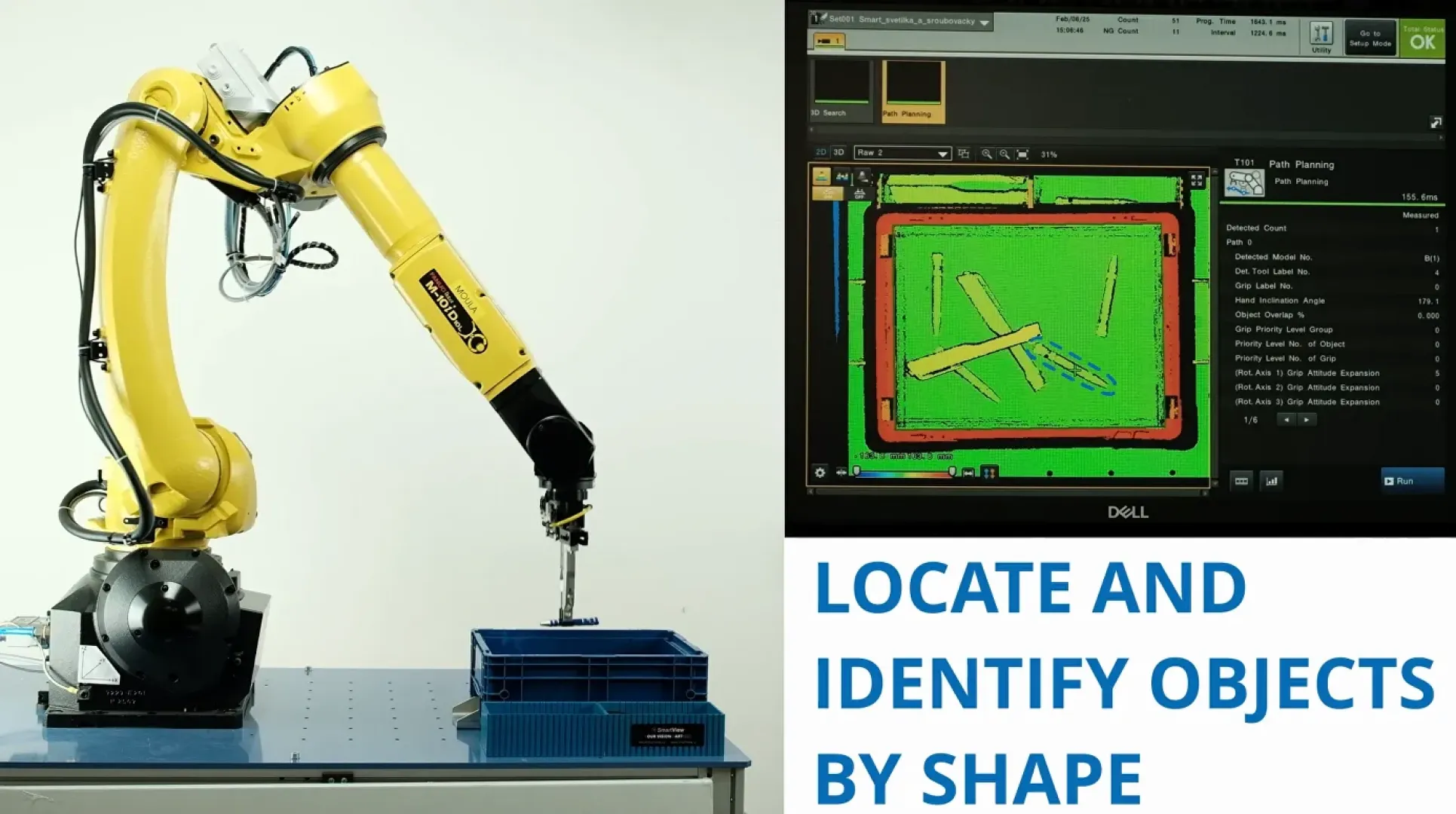
Automated part picking from boxes (bin picking) is a crucial part of modern manufacturing processes, especially in industrial automation. This application uses a 3D head with a pattern projector and a robotic arm, enabling precise detection, identification and manipulation of parts in real time.
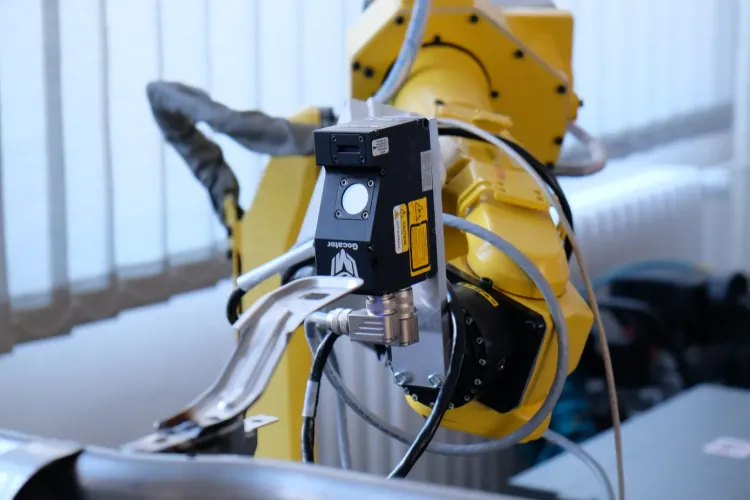
- 3D head with a pattern projector – enables scanning of unstructured parts in a box and their accurate identification.
- A robotic arm – performs the actual manipulation of parts based on data from the 3D head.
The application aims for automatic picking of unstructured parts from boxes within the time window defined by the customer. The system must ensure that individual parts are correctly recognized and safely picked up without collision risk.
- Unstructured placement of parts – each piece may have different orientation, complicating gripping.
- Robot and 3D head parameterization – crucial for proper coordination between scanning and manipulation.
- Identification of anti-collision states – preventing the robotic arm from hitting the box walls or other parts.
The system works on the principle of robot arm navigation using a 3D head. After scanning the box content, the software evaluates the position of each part, determines the optimal gripping point and ensures safe, anti-collision movement of the robotic arm.
Thanks to the combination of 3D scanning and precise handling, we achieved a functional automated system for picking parts from a box.
- The robot does not hit the box walls – anti-collision states are handled in the 3D head software.
- Each picked part is correctly identified and safely manipulated according to defined parameters.
After scanning and part removal, automatic evaluation and display of results on the computer monitor are performed. The system enables visual display of the position of each part, its recognition and efficient coordination of robotic motion.
This system leverages experience in manufacturing, calibration and parameterization of 3D devices and robotic arms, providing a robust solution for automated handling of unstructured parts.
Thanks to the combination of 3D scanning, advanced software evaluation and precise robotic motion control, maximum efficiency and safety are ensured during bin picking operations.