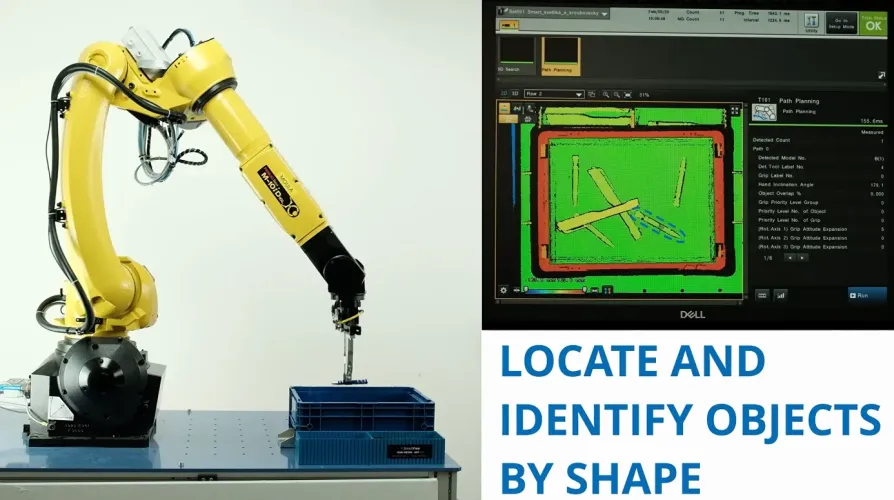
Ve výrobním procesu hraje robotizované vychystávání dílů z blistru klíčovou roli při automatizaci manipulace, zajištění přesnosti uchopení a efektivní integraci do výrobní linky. Tento systém využívá 3D hlavu s projektorem v kombinaci s robotickým ramenem, což umožňuje přesné detekování dílů, jejich uchopení a minimalizaci chyb při manipulaci.
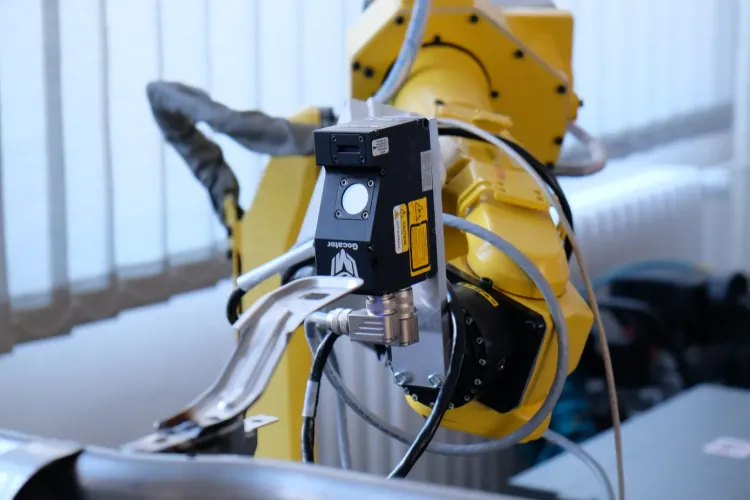
- 3D hlava s projektorem vzorů – umožňuje snímání dílů a přesné identifikování jejich polohy v blistru.
- Robotické rameno – provádí automatizovanou manipulaci na základě vyhodnocených dat a parametrizace.
Systém musí zajistit kalibraci a parametrizaci robota i 3D hlavy, aby bylo dosaženo:
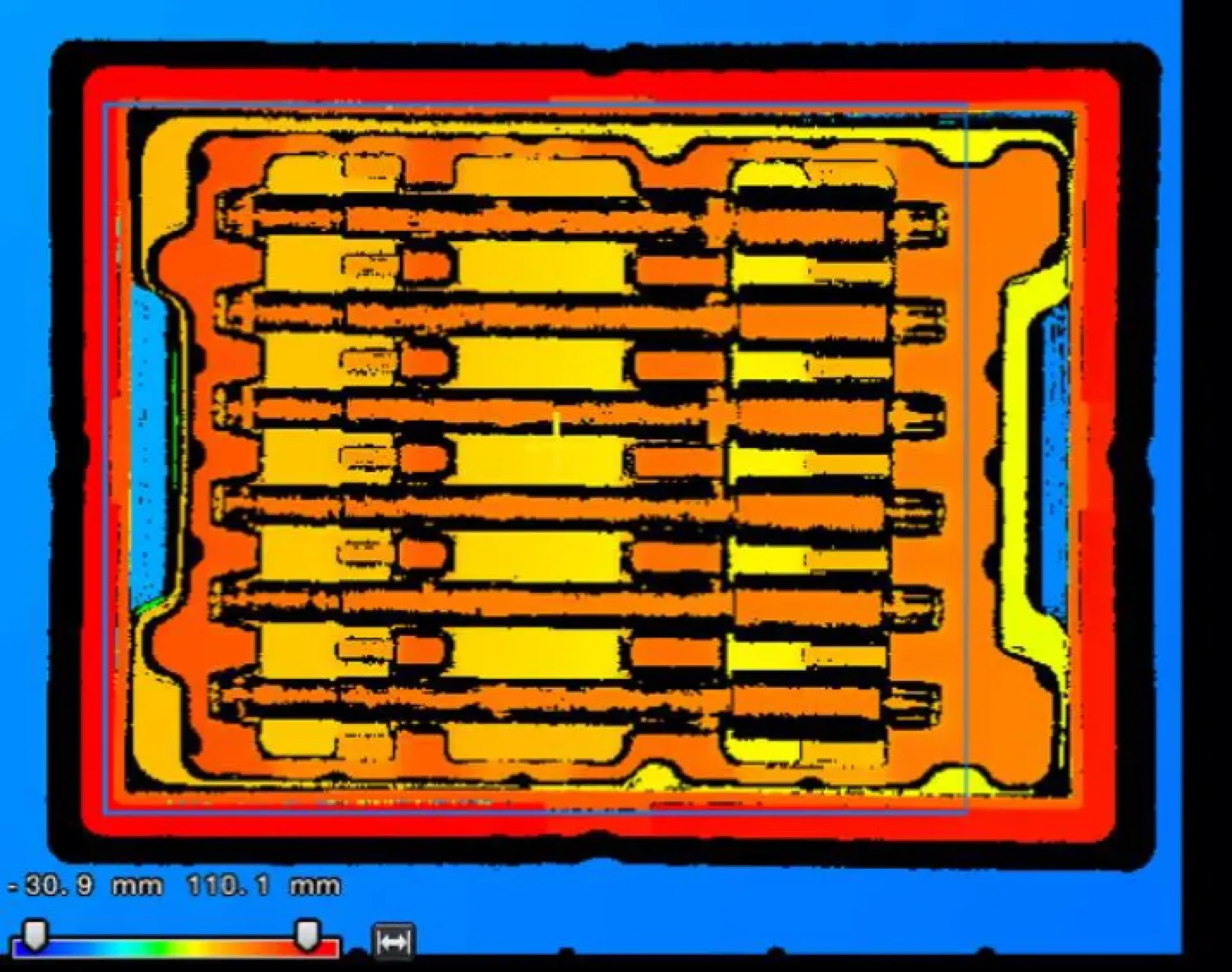
- Přesné detekce polohy dílů v blistru pomocí 3D snímání.
- Optimálního uchopení dílů, které zajistí bezpečnou manipulaci bez poškození.
- Minimalizace chyb a zvýšení rychlosti manipulace pro splnění cyklového času výrobní linky.
- Návrh uchopovacího zařízení – uchopovací mechanizmus musí být schopen bezpečně manipulovat s různými typy dílů.
- Optimalizace místa uchopení dílu – nutné správně zvolit bod uchopení, aby se zabránilo deformaci nebo nesprávné manipulaci.
- Kalibrace robotického ramene a 3D hlavy – nutné zajistit vysokou přesnost a synchronizaci pohybů.
- Navigace robotického ramene pomocí 3D hlavy s projektorem, což umožňuje přesnou lokalizaci dílů v blistru.
- Optimalizace uchopovacího mechanizmu, aby bylo možné bezpečně manipulovat s různými typy dílů.
- Softwarová parametrizace pro minimalizaci chyb, která umožňuje přizpůsobení systému podle aktuálních požadavků výroby.
- Spolehlivé detekce dílů v blistru.
- Optimalizovaného uchopení, které zabraňuje nesprávné manipulaci.
- Splnění časového cyklu, což umožňuje nepřetržitý chod výrobní linky bez narušení procesu.
- Zobrazení správného uchopení dílů v reálném čase.
- Detekce problémových dílů, které nejsou vhodně umístěny.
- Záznam dat pro zpětnou kontrolu a optimalizaci procesu.
Tento systém využívá dlouholeté zkušenosti v oblasti kalibrace a parametrizace 3D zařízení a robotických ramen, což umožňuje precizní, efektivní a bezpečné automatizované odebírání dílů z blistru.
Díky inteligentní kombinaci 3D snímání, parametrizace a pokročilých algoritmů manipulace je zajištěna maximální přesnost detekce, čímž se minimalizují chyby v procesu vychystávání dílů.